Гибкие солнечные модули сверхлегкие с солнечными элементами Maxeon
620 г упакованной солнечной энергии

Гибкость, долговечность, водонепроницаемость и простота установки
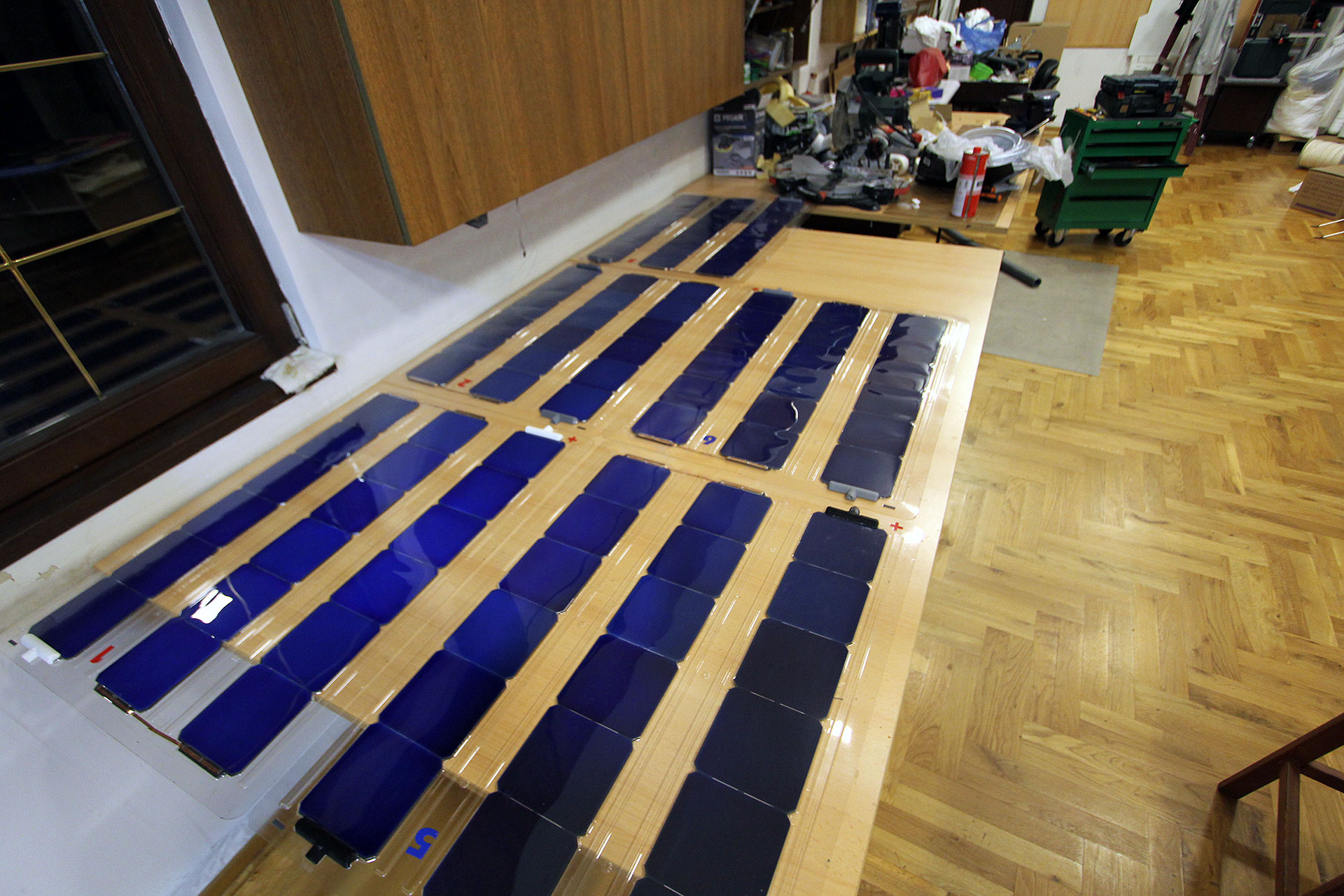
Когда несколько лет назад мы начали проект Trans-Atlantic Solar Blimp, мы поняли, что не хватает прочных и в то же время легких солнечных модулей, специально разработанных для дирижаблей или технологии LTA в целом. Мы изучили весь мировой рынок и пришли к выводу, что нам нужно разрабатывать их самим.
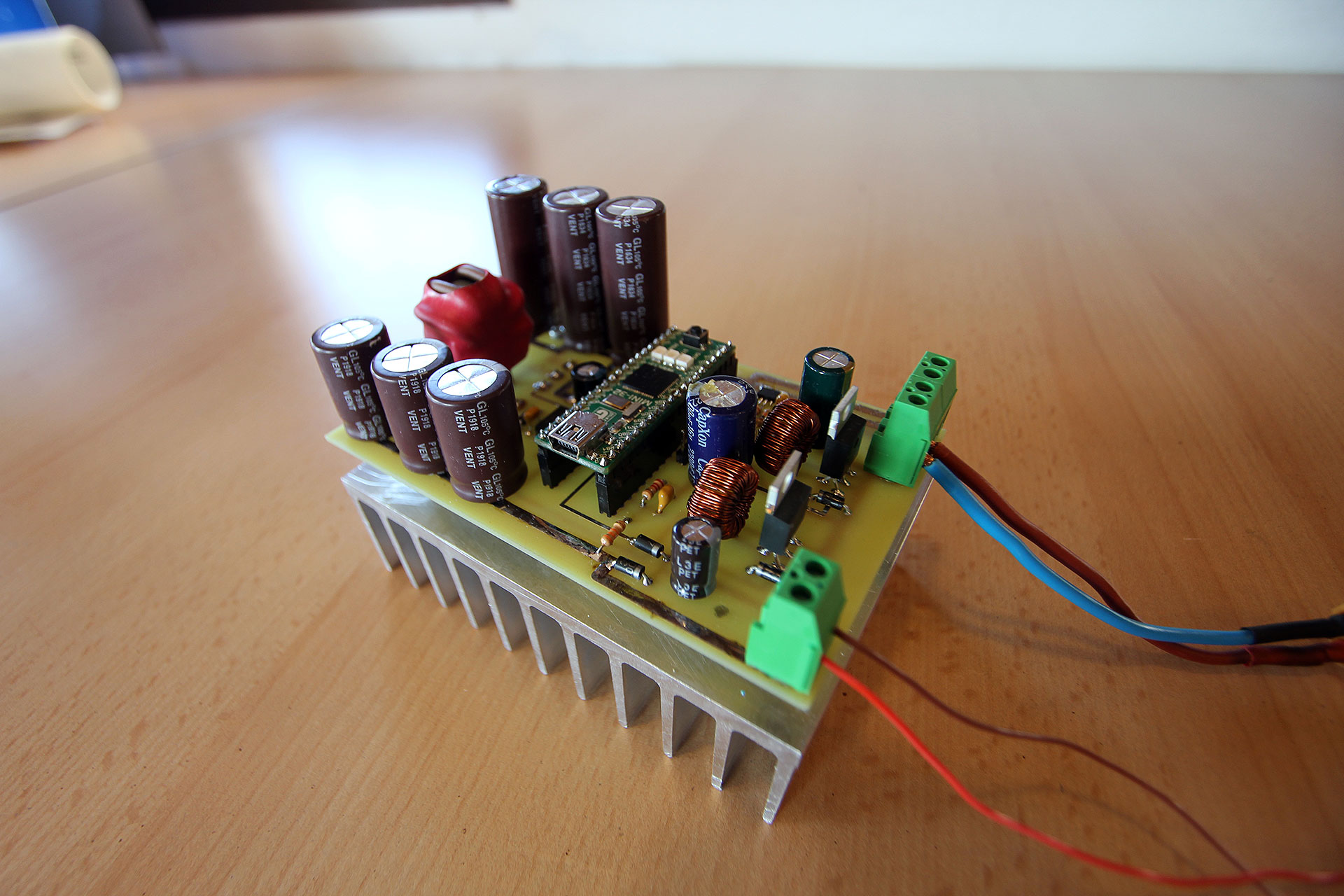
Такая же ситуация была с проблемой контроля/распределения энергии. Другими словами, как распределить энергию, полученную от солнечных батарей. Поскольку энергия из-за стабильности напряжения должна поступать от батарей, чтобы иметь стабильное и постоянное напряжение и силу тока (В и А). Итак, помимо разработки гибких модулей, нам также предстояло разработать интеллектуальное устройство для распределения энергии.
Благодаря разработкам, многочисленным испытаниям и неудачам мы пришли к гибким солнечным элементам со следующими характеристиками:
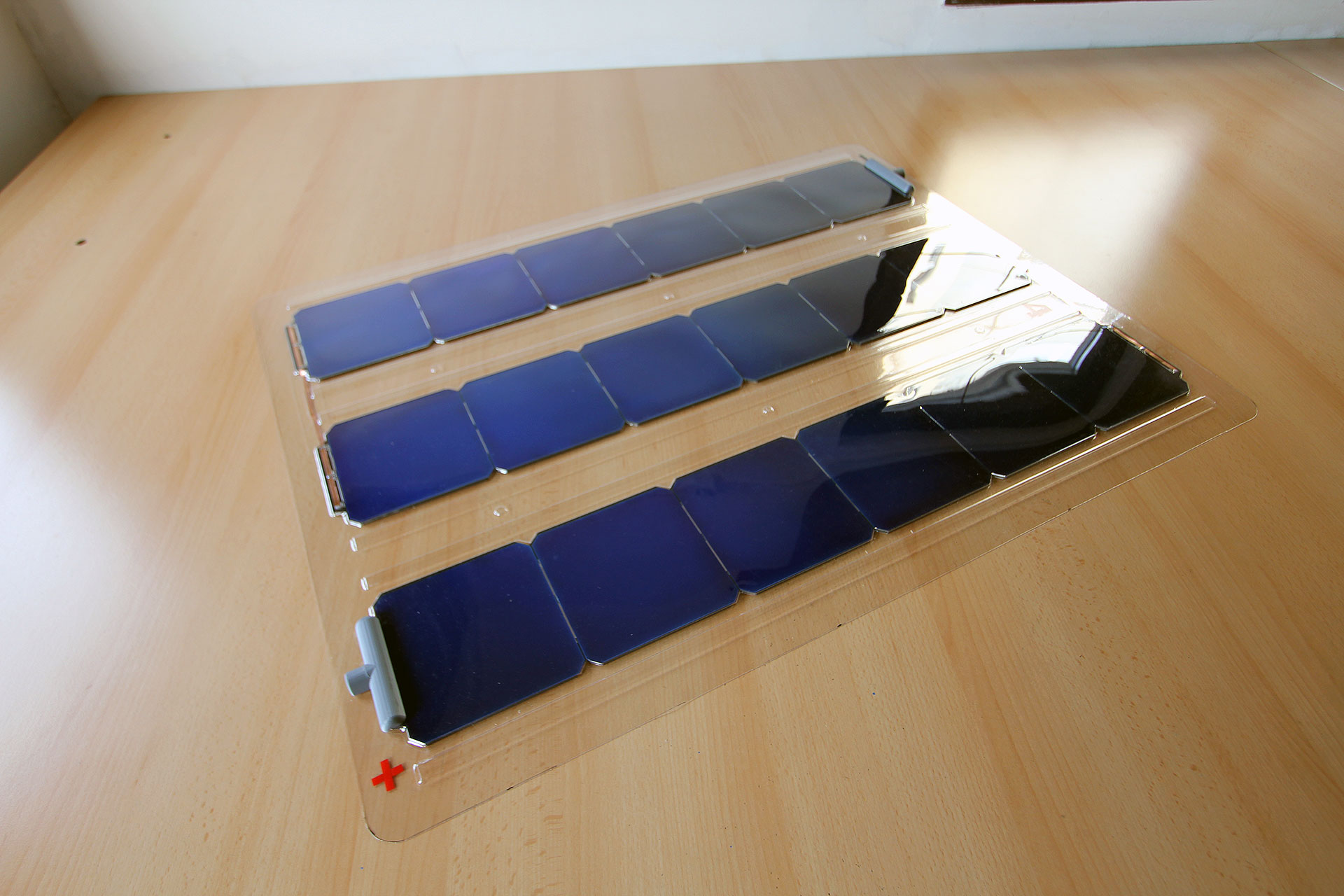
- 620 г на модуль с коннекторами (18 ячеек)
- SunPower Maxeon Gen III или новее
– 18 ячеек на модуль
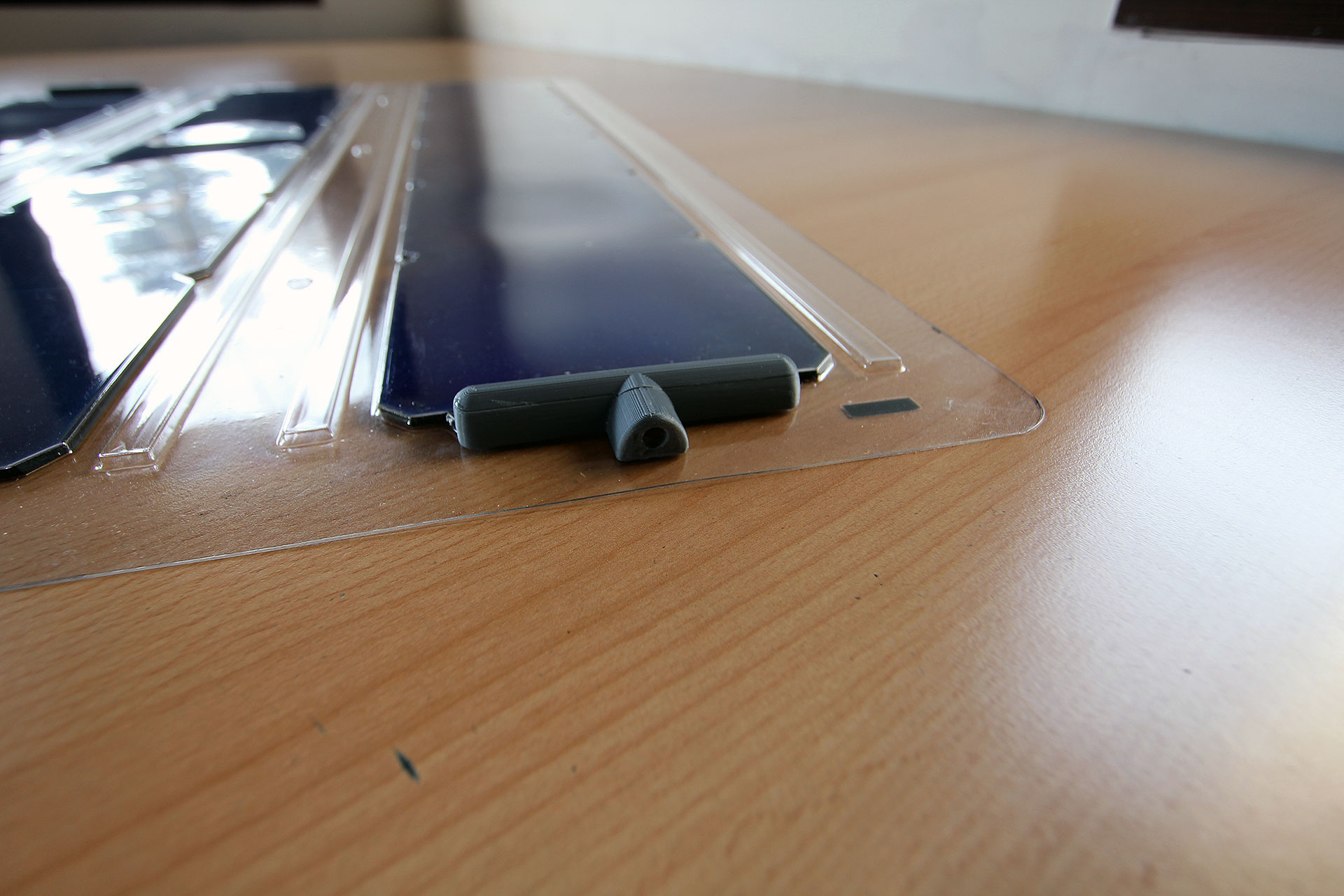
- Верхний модуль Защитный слой термоформованный ПЭТ
- Количество рядов ячеек 3 или 2 (3 x 6 или 3 x 9)
- Способ подключения ячеек Последовательный
- Пиковая мощность и А 12,5 + В и более 6 А
- Основа ячеек (обратные защитные слои) пена Eva + Pressphan + 0,5 мм прозрачный ПВХ
– Водонепроницаемость
- Выходные разъемы + и – Разъемы типа «банан» 3,5 мм
- Система крепления на конверте Airelease ПВХ белый (ленты 50 мм)

Сниженное потребление энергии
Благодаря предыдущей работе над дирижаблем T-Blimp результаты показали нам, что размещение основного двигателя по горизонтальной оси дирижабля обеспечивает наилучшую передачу энергии с наименьшими потерями
Более высокая маневренность
Поскольку получившаяся конструкция представляет собой максимально возможное расстояние между приводным двигателем и рулями, минимальное смещение элерона сильно отклоняет UniBlimp в трехмерном пространстве
Большая автономность
В результате всех радикальных изменений (перенос двигателя в нос, большое расстояние между двигателем и стабилизатором и радикальное сокращение необходимой электроники и компонентов,...) мы получили гораздо большую автономность полета, чем при классической конструкции дирижабля.